本文最后更新于30 天前,其中的信息可能已经过时,如有错误请发送邮件到2067965693@qq.com
初始化摄像模组
from media.sensor import *
from media.display import *
from media.media import *
# 确保分辨率一致且在设备支持范围内
DETECT_WIDTH = 720
DETECT_HEIGHT = 480
def main():
try:
# 初始化传感器
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset()
# 设置与显示尺寸一致的分辨率
# VGA正好是640x480,避免尺寸不匹配问题
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT) # 明确使用640x480分辨率
sensor.set_pixformat(sensor.RGB565)
# 初始化显示,使用与传感器相同的尺寸
Display.init(Display.VIRT, width=DETECT_WIDTH, height=DETECT_HEIGHT, fps=100) # 降低帧率减少压力
MediaManager.init()
# 启动传感器
sensor.run()
fps = time.clock()
# 主循环
while True:
ps = fps.tick()
img = sensor.snapshot() # 获取一帧图片
img.draw_string_advanced(1,1,50,str(fps.fps()))
Display.show_image(img)
gc.collect()
except Exception as e:
print(f"发生错误: {e}")硬件SPI屏
import time
from machine import FPIOA, Pin, SPI
# 引脚定义(重点关注DC引脚)
SPI_NUM = 0 # 使用SPI1
SPI_SCK = 15 # SCK引脚
SPI_MOSI = 16 # MOSI引脚
SPI_CS = 37 # CS引脚
LCD_DC = 41 # DC引脚(数据/命令选择,连接到GPIO1)
LCD_RST = 36 # 复位引脚
LCD_BL = 37 # 背光控制引脚
# ST7735命令定义
ST7735_NOP = 0x00
ST7735_SWRESET = 0x01
ST7735_RDDID = 0x04
ST7735_RDDST = 0x09
ST7735_SLPIN = 0x10
ST7735_SLPOUT = 0x11
ST7735_PTLON = 0x12
ST7735_NORON = 0x13
ST7735_INVOFF = 0x20
ST7735_INVON = 0x21
ST7735_DISPOFF = 0x28
ST7735_DISPON = 0x29
ST7735_CASET = 0x2A
ST7735_RASET = 0x2B
ST7735_RAMWR = 0x2C
ST7735_RAMRD = 0x2E
ST7735_PTLAR = 0x30
ST7735_COLMOD = 0x3A
ST7735_MADCTL = 0x36
# 颜色定义
class ST7735:
BLACK = 0x0000
BLUE = 0x001F
RED = 0xF800
GREEN = 0x07E0
CYAN = 0x07FF
MAGENTA = 0xF81F
YELLOW = 0xFFE0
WHITE = 0xFFFF
def __init__(self, width=240, height=240,PL=50):
print("导入LCD库成功")
self.width = width
self.height = height
self.PL = PL
# 配置SPI引脚
self.fpioa = FPIOA()
self.fpioa.set_function(SPI_SCK, FPIOA.QSPI0_CLK)
self.fpioa.set_function(SPI_MOSI, FPIOA.QSPI0_D0)
self.fpioa.set_function(SPI_CS, FPIOA.GPIO37) # CS作为GPIO手动控制
self.fpioa.set_function(LCD_DC, FPIOA.GPIO41) # CS作为GPIO手动控制
self.fpioa.set_function(LCD_RST, FPIOA.GPIO36) # CS作为GPIO手动控制
self.fpioa.set_function(LCD_BL, FPIOA.GPIO37) # CS作为GPIO手动控制
# 初始化控制引脚(重点初始化DC引脚)
self.cs = Pin(SPI_CS, Pin.OUT,drive=15) # 初始拉高,不选中
self.dc = Pin(LCD_DC, Pin.OUT,drive=15) # DC初始为0(命令模式)
self.rst = Pin(LCD_RST, Pin.OUT,drive=15)
self.bl = Pin(LCD_BL, Pin.OUT,drive=15)
# 初始化SPI控制器
self.spi =SPI(1,baudrate=1000*1000*self.PL, polarity=1, phase=1, bits=8)
self.init_display()
def init_display(self):
# 初始化序列
print("in")
self.reset()
# Sleep out
self.write_cmd(0x11)
time.sleep_ms(150)
# 65k mode
self.write_cmd(0x3A)
self.write_data(0x05)
# VCOM
self.write_cmd(0xC5)
self.write_data(0x1A)
# 配置显示方向
self.write_cmd(0x36)
# ST7789V Frame rate setting
self.write_cmd(0xB2) # Porch Setting
self.write_data([0x05, 0x05, 0x00, 0x33, 0x33])
# Gate Control
self.write_cmd(0xB7)
self.write_data(0x05) # 12.2v -10.43v
# ST7789V Power setting
self.write_cmd(0xBB) # VCOM
self.write_data(0x3F)
self.write_cmd(0xC0)
self.write_data(0x2C)
self.write_cmd(0xC2)
self.write_data(0x01)
self.write_cmd(0xC3)
self.write_data(0x0F)
self.write_cmd(0xC4)
self.write_data(0x20)
self.write_cmd(0xC6) # Frame Rate Control in Normal Mode
self.write_data(0x01) # 111Hz
self.write_cmd(0xD0) # Power Control 1
self.write_data([0xA4, 0xA1])
self.write_cmd(0xE8) # Power Control
self.write_data(0x03)
self.write_cmd(0xE9) # Equalize time control
self.write_data([0x09, 0x09, 0x08])
# ST7735S Gamma Sequence
self.write_cmd(0xE0)
self.write_data([0xD0, 0x05, 0x09, 0x09, 0x08, 0x14, 0x28,
0x33, 0x3F, 0x07, 0x13, 0x14, 0x28, 0x30])
self.write_cmd(0xE1)
self.write_data([0xD0, 0x05, 0x09, 0x09, 0x08, 0x03, 0x24,
0x32, 0x32, 0x3B, 0x14, 0x13, 0x28, 0x2F])
# 反显
self.write_cmd(0x21)
# 显示开启
self.write_cmd(0x29)
self.bl.value(1)
def reset(self):
# 硬件复位
self.rst.value(0)
time.sleep_ms(100)
self.rst.value(1)
time.sleep_ms(100)
def write_cmd(self, cmd):
# 发送命令
self.cs.value(0)
self.dc.value(0) # 命令模式
self.spi.write(bytes([cmd]))
self.cs.value(1)
def write_data(self, data):
# 发送数据
self.cs.value(0)
self.dc.value(1) # 数据模式
if isinstance(data, list):
self.spi.write(bytes(data))
else:
self.spi.write(bytes([data]))
self.cs.value(1)
def set_window(self, x, y, width, height):
# 计算右下角坐标
x1 = x + width - 1 # 宽度减1是因为包含起始点
y1 = y + height - 1 # 高度减1是因为包含起始点
# 设置显示窗口
self.write_cmd(ST7735_CASET) # 列地址设置
self.write_data([(x >> 8) & 0xFF, x & 0xFF,
(x1 >> 8) & 0xFF, x1 & 0xFF])
self.write_cmd(ST7735_RASET) # 行地址设置
self.write_data([(y >> 8) & 0xFF, y & 0xFF,
(y1 >> 8) & 0xFF, y1 & 0xFF])
self.write_cmd(ST7735_RAMWR) # 准备写入
def LCD_Fill(self, xsta, ysta, xend, yend, color):
"""指定区域填充颜色"""
if xsta > xend or ysta > yend:
return
if xend >= self.width:
xend = self.width - 1
if yend >= self.height:
yend = self.height - 1
width = xend - xsta + 1
height = yend - ysta + 1
self.set_window(xsta, ysta, width, height)
# 准备颜色数据 (RGB565格式拆分为两个字节)
color_high = (color >> 8) & 0xFF
color_low = color & 0xFF
# 优化填充效率,一次发送多字节
self.cs.value(0)
self.dc.value(1)
# 这里使用循环发送,实际应用中可根据内存情况优化
for _ in range(height * width):
self.spi.write(bytes([color_high, color_low]))
self.cs.value(1)
def LCD_DrawPoint(self, x, y, color):
"""在指定位置画一个点"""
if x >= self.width or y >= self.height:
return
self.set_window(x, y, 1, 1)
self.write_data([(color >> 8) & 0xFF, color & 0xFF])
def LCD_DrawLine(self, x1, y1, x2, y2, color):
"""在指定位置画一条线(Bresenham算法)"""
dx = abs(x2 - x1)
dy = abs(y2 - y1)
sx = 1 if x2 > x1 else -1
sy = 1 if y2 > y1 else -1
err = dx - dy
while True:
self.LCD_DrawPoint(x1, y1, color)
if x1 == x2 and y1 == y2:
break
e2 = 2 * err
if e2 > -dy:
err -= dy
x1 += sx
if e2 < dx:
err += dx
y1 += sy
def LCD_DrawRectangle(self, x1, y1, x2, y2, color):
"""在指定位置画一个矩形"""
self.LCD_DrawLine(x1, y1, x2, y1, color) # 上边缘
self.LCD_DrawLine(x1, y2, x2, y2, color) # 下边缘
self.LCD_DrawLine(x1, y1, x1, y2, color) # 左边缘
self.LCD_DrawLine(x2, y1, x2, y2, color) # 右边缘
def Draw_Circle(self, x0, y0, r, color):
"""在指定位置画一个圆(中点圆算法)"""
x = 0
y = r
d = 3 - 2 * r
while x <= y:
self.LCD_DrawPoint(x0 + x, y0 + y, color)
self.LCD_DrawPoint(x0 - x, y0 + y, color)
self.LCD_DrawPoint(x0 + x, y0 - y, color)
self.LCD_DrawPoint(x0 - x, y0 - y, color)
self.LCD_DrawPoint(x0 + y, y0 + x, color)
self.LCD_DrawPoint(x0 - y, y0 + x, color)
self.LCD_DrawPoint(x0 + y, y0 - x, color)
self.LCD_DrawPoint(x0 - y, y0 - x, color)
x += 1
if d < 0:
d += 4 * x + 6
else:
d += 4 * (x - y) + 10
y -= 1
def LCD_ShowChar(self, x, y, num, fc, bc, sizey, mode):
"""显示一个字符(需配合字模数据)"""
# 这里仅为框架实现,实际使用需要字模数据
# sizey: 字符大小,如12,16,24等
# mode: 0=透明模式,1=非透明模式
# 计算字符显示区域
char_width = sizey // 2 if sizey != 12 else 6
char_height = sizey
# 清背景
if mode == 1:
self.LCD_Fill(x, y, x + char_width - 1, y + char_height - 1, bc)
# 这里需要从字模库中获取字符数据并绘制
# 示例:假设已经获取到字模数据dot_matrix
dot_matrix = [0] * (char_width * char_height // 8) # 占位
for i in range(char_height):
for j in range(char_width):
byte_index = i * (char_width // 8) + (j // 8)
bit_index = j % 8
if dot_matrix[byte_index] & (1 << (7 - bit_index)):
self.LCD_DrawPoint(x + j, y + i, fc)
def LCD_ShowString(self, x, y, p, fc, bc, sizey, mode):
"""显示字符串"""
x0 = x
for char in p:
# 检查是否需要换行
if x + (sizey//2) >= self.width:
y += sizey
x = x0
self.LCD_ShowChar(x, y, char, fc, bc, sizey, mode)
x += (sizey//2) + 1 # 字符间距
def mypow(self, m, n):
"""求幂运算 m^n"""
result = 1
for _ in range(n):
result *= m
return result
def LCD_ShowIntNum(self, x, y, num, len, fc, bc, sizey):
"""显示整数变量"""
str_num = "%0{}d".format(len) % num
self.LCD_ShowString(x, y, str_num.encode(), fc, bc, sizey, 1)
def LCD_ShowFloatNum1(self, x, y, num, len, fc, bc, sizey):
"""显示两位小数变量"""
# 四舍五入保留两位小数
int_part = int(num)
dec_part = int(round((num - int_part) * 100))
str_num = "%0{}d.%02d".format(len) % (int_part, dec_part)
self.LCD_ShowString(x, y, str_num.encode(), fc, bc, sizey, 1)
def TFT_display_image(self, startX, startY, img_width, img_height, img_data):
endX = startX + img_width - 1
endY = startY + img_height - 1
if endX >= self.width:
endX = self.width - 1
img_width = endX - startX + 1 # 修正实际显示宽度
if endY >= self.height:
endY = self.height - 1
img_height = endY - startY + 1 # 修正实际显示高度
# 若图像尺寸为0则直接返回
if img_width <= 0 or img_height <= 0:
return
big_endian_data = bytearray(len(img_data))
# 每两个字节交换位置(小端序->大端序)
for i in range(0, len(img_data), 2):
big_endian_data[i] = img_data[i+1] # 高位字节
big_endian_data[i+1] = img_data[i] # 低位字节
# 3. 设置显示窗口(图像显示区域)
self.set_window(startX, startY, img_width, img_height)
# 4. 批量发送图像数据(RGB565格式)
self.dc.value(1) # 数据模式(发送像素数据)
self.spi.write(big_endian_data)
# 汉字显示功能需要配合相应的字模库,这里提供框架
def LCD_ShowChinese16x16(self, startX, startY, buf, textColor, backgroundColor, sizey, mode):
"""显示单个16x16汉字"""
self._show_chinese(startX, startY, 16, 16, buf, textColor, backgroundColor, mode)
def LCD_ShowChinese24x24(self, x, y, s, fc, bc, sizey, mode):
"""显示单个24x24汉字"""
self._show_chinese(x, y, 24, 24, s, fc, bc, mode)
def LCD_ShowChinese32x32(self, x, y, s, fc, bc, sizey, mode):
"""显示单个32x32汉字"""
self._show_chinese(x, y, 32, 32, s, fc, bc, mode)
def LCD_ShowChinese(self, x, y, s, fc, bc, sizey, mode):
"""显示汉字串"""
x0 = x
char_size = sizey
for i in range(0, len(s), char_size*2): # 假设每个汉字占用sizey*2字节
if x + char_size >= self.width:
y += char_size
x = x0
# 根据字号选择对应的显示函数
if sizey == 16:
self.LCD_ShowChinese16x16(x, y, s[i:i+32], fc, bc, sizey, mode)
elif sizey == 24:
self.LCD_ShowChinese24x24(x, y, s[i:i+72], fc, bc, sizey, mode)
elif sizey == 32:
self.LCD_ShowChinese32x32(x, y, s[i:i+128], fc, bc, sizey, mode)
x += char_size + 2 # 汉字间距
def _show_chinese(self, x, y, width, height, buf, fc, bc, mode):
"""汉字显示内部实现函数"""
if mode == 1:
self.LCD_Fill(x, y, x + width - 1, y + height - 1, bc)
for i in range(height):
for j in range(width):
byte_index = i * (width // 8) + (j // 8)
bit_index = j % 8
if buf[byte_index] & (1 << (7 - bit_index)):
self.LCD_DrawPoint(x + j, y + i, fc)
def TFT_LCD_Show_Text(self, startX, startY, unicode_buf, len, text_color, background_color, size, mode):
"""显示Unicode文本"""
# 这里实现Unicode字符显示,需要对应的字库支持
pass
if __name__ == "__main__":
# 初始化LCD
lcd = ST7735()
# 填充背景色为蓝色
lcd.LCD_Fill(0,0,240,240,RED)
while True:
time.sleep(1)
# 保持显示
各类使用方法:https://wiki.lckfb.com/zh-hans/lushan-pi-k230/api/openmv/image_module_api.html#_11-11-count
Image类的使用
.find_qrcodes()寻找二维码
payload(): 返回二维码包含的文本内容rect(): 返回二维码的矩形坐标 (x, y, w, h)corners(): 返回二维码四个角的坐标
.draw_rectangle()画正方形
image.draw_rectangle(x, y, w, h[, color[, thickness=1[, fill=False]]])
.draw_string_advanced()画字符串支持中文
image.draw_string_advanced(x, y, char_size, str, [color, font])
图片处理
gry.binary([THRESHOLD])#二值化
gry.erode(1)#腐蚀
gry.invert()#翻转
gry.find_edges(image.EDGE_CANNY)#寻找边沿
gry.dilate(3)#膨胀代码部分
import gc
import time
from media.sensor import *
from media.display import *
from media.media import *
# 确保分辨率一致且在设备支持范围内
DETECT_WIDTH = 720
DETECT_HEIGHT = 480
def main():
try:
# 初始化传感器
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset()
# 设置与显示尺寸一致的分辨率
# VGA正好是640x480,避免尺寸不匹配问题
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT) # 明确使用640x480分辨率
sensor.set_pixformat(sensor.RGB565)
# 初始化显示,使用与传感器相同的尺寸
Display.init(Display.VIRT, width=DETECT_WIDTH, height=DETECT_HEIGHT, fps=100) # 降低帧率减少压力
MediaManager.init()
# 启动传感器
sensor.run()
fps = time.clock()
# 主循环
while True:
ps = fps.tick()
img = sensor.snapshot() # 获取一帧图片
# 寻找二维码并返回qrcode数组
for cod in img.find_qrcodes():
# rect()返回一个(x,y,w,h)的二维码位置元组
img.draw_rectangle(cod.rect(),color=(255, 0, 0))
# payload()返回二维码内容
img.draw_string_advanced(cod.rect()[0],cod.rect()[1]-40,30,str(cod.payload()))
img.draw_string_advanced(1,1,50,str(fps.fps()))
Display.show_image(img)
gc.collect()
except Exception as e:
print(f"发生错误: {e}")
#(39, 100, 37, 127, 27, 127)
if __name__ == "__main__":
main()
2025电赛C题
import gc
import time
from media.sensor import *
from media.display import *
from media.media import *
#import User_LCD.User_LCD as U_LCD
import os
from machine import UART
from machine import FPIOA
import _thread
import cmath
from machine import ADC
import random
ADC0 = ADC(0)
ADC1 = ADC(1)
fpioa = FPIOA()
# 将指定引脚配置为 UART 功能
fpioa.set_function(5, FPIOA.UART2_TXD)
fpioa.set_function(6, FPIOA.UART2_RXD)
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
DETECT_WIDTH = 1280
DETECT_HEIGHT = 720
#边沿
THRESHOLD =(70, 212)
#ROI
box = (284,2,760,696)
#窗口中心
Window_x = 664
Window_y = 357
#纸张大小
FRAME_WIDTH_MM = 170
FRAME_HEIGH_MM = 256
#标定值
BD_JL = 1400
BD_W = 198
BD_H = 300
#h417
#w210
colorBloer =(45, 0) #中心色块颜色
#Usart
Send_Data_D = None
Send_Data_X = None
Messge = None
Send_I = 0
Send_IM = 0
#################################全局初始化##############################################
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset()
# 设置分辨率与像素格式
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(sensor.RGB565)
# 初始化显示
Display.init(Display.VIRT, width=DETECT_WIDTH, height=DETECT_HEIGHT, fps=100)
MediaManager.init()
# 启动传感器
sensor.run()
print(os.listdir())
##############################################################################
def find_center_min_blob(blobs):
# 找中间最小的色块
blob = None
min_area = 99999999
for b in blobs:
if(abs(b.cx()-Window_x)+abs(b.cy()-Window_y))<10:
continue
if b.area() < 10000:
continue
if b.area() > min_area:
continue
blob = b
min_area = b.area()
return blob
def find_center_min_FX(blobs,w,h,x,y):
blob = None
min_area = 99999999
x1 = x+w
y1 = y+h
for b in blobs:
jx = b.rect()
mj = b.w()*b.h()
if jx[0]<x or jx[1]<y or jx[0]+jx[2]>x1 or jx[1]+jx[3]>y1:
continue
if mj > w*h or mj < 1000:
continue
if mj > min_area:
continue
blob = b
min_area = mj
return blob
def find_center(blobs):
# 找中间最小的色块
blob = None
min_area = 99999999
for b in blobs:
if(abs(b.cx()-Window_x)+abs(b.cy()-Window_y))<200:
if b.area() < 10000:
continue
if b.area() > min_area:
continue
blob = b
min_area = b.area()
return blob
def Usart_for_data_Re():
Uar_Receive_Data = None
while True:
int_list = []
if uart.any(): # 检测数据
raw_data = uart.read(uart.any()) # 读取所有数据
int_list = list(raw_data)
hex_list = [hex(x) for x in int_list]
print(hex_list)
return hex_list
time.sleep_ms(1)
def Usart_for_data_Se(messge):
Over=bytes([0xff, 0xff, 0xff])
uart.write(messge)
uart.write(Over)
def Usart_PD_Data():
State_Data = {
'Id':0,
'Data':[],
'Tm':0,
'Value':0
}
while True:
Data = Usart_for_data_Re()
if Data[0]=='0x4':
State_Data['Id'] = 1
elif Data[0]=='0x77':
State_Data['Id'] = 2
State_Data['Data'] = Data
if Data[1]=='0x1':
State_Data['Tm'] = 1
elif Data[1]=='0x2':
State_Data['Tm'] = 2
elif Data[1]=='0x3':
State_Data['Tm'] = 3
State_Data['Value']= Data[4]
return State_Data
def median_filter(data, window_size):
smoothed = []
half_window = window_size // 2
padded_data = [data[0]] * half_window + data + [data[-1]] * half_window # 边界填充
for i in range(len(data)):
window = padded_data[i:i+window_size]
window_sorted = sorted(window)
median = window_sorted[window_size // 2] # 取中位数
smoothed.append(median)
return smoothed
lock = _thread.allocate_lock()
def task1():
global Send_I
global Send_IM
while True:
lock.acquire()
ADrange=[]
for i in range(100):
# vl = ((ADC0.read_u16()-4)/4095*1.8)/40/0.016
vl = ADC0.read_uv()/1000000/40/0.016
ADrange.append(vl)
time.sleep_ms(1)
filters = median_filter(ADrange,7)
Send_I = (sum(filters)/len(filters))*1.031
if Send_I < 0.6:
Send_I = Send_I*1.04
if Send_IM<Send_I:
Send_IM = Send_I
print(Send_I)
print(Send_IM)
lock.release()
time.sleep_ms(1)
# time.sleep_ms(500)
## 启动新线程:参数为(函数, (参数元组))
_thread.start_new_thread(task1,()) # 线程1,每秒执行
def task2():
global Send_I
global Send_IM
while True:
time.sleep_ms(500)
lock.acquire()
Usart_for_data_Se(f"t10.txt=\"{round(Send_I,3)}\"")
Usart_for_data_Se(f"t17.txt=\"{round(Send_I,3)}\"")
Usart_for_data_Se(f"t18.txt=\"{round(4.998*Send_I,3)}\"")
Usart_for_data_Se(f"t19.txt=\"{round(4.998*Send_IM,3)}\"")
lock.release()
time.sleep_ms(1)
# 启动新线程:参数为(函数, (参数元组))
_thread.start_new_thread(task2,()) # 线程1,每秒执行
def ts():
img = sensor.snapshot()
# img = img.lens_corr(0.1)
img.draw_rectangle(box,color=(255,0,0))
grays = img.to_grayscale()
gry = img.to_grayscale()
cs = img.to_grayscale()
grays.lens_corr(0.5)
find_box = grays.find_blobs([THRESHOLD],roi=box)
if(find_box):
largest_blob1 = find_center(find_box)
if(largest_blob1):
img.draw_rectangle(largest_blob1.rect(),color=(0,0,255),thickness=10)
# 计算实际距离
b_x = largest_blob1.x()
b_y = largest_blob1.y()
b_w = largest_blob1.w()
b_h = largest_blob1.h()
print("h:",b_h)
print("w:",b_w)
Display.show_image(img)
gc.collect()
def T1():
Last_BZ_JL = []
Last_WT_JL = []
WT_JL = None
BZ_JL = None
flag = 0
Err = 0
while flag==0:
BZ_JL =None
WT_JL = None
img = sensor.snapshot()
# img = img.lens_corr(0.1)
img.draw_rectangle(box,color=(255,0,0))
grays = img.to_grayscale()
gry = img.to_grayscale()
cs = img.to_grayscale()
grays.lens_corr(0.5)
find_box = grays.find_blobs([THRESHOLD],roi=box)
if(find_box):
largest_blob1 = find_center(find_box)
if(largest_blob1):
img.draw_rectangle(largest_blob1.rect(),color=(0,0,255),thickness=10)
# 计算实际距离
b_x = largest_blob1.x()
b_y = largest_blob1.y()
b_w = largest_blob1.w()
b_h = largest_blob1.h()
BZ_JL = BD_JL*BD_H/b_h
print("距离1:",BZ_JL)
# BZ_JL = BD_JL*BD_W/b_w
# print("距离2:",BZ_JL)
# 内部找小图形
x_start = largest_blob1.x()+10
y_start = largest_blob1.y()+10
roi_width = largest_blob1.w()-20 # 最小宽度=1
roi_height = largest_blob1.h()-20 # 使用高度而非宽度!
frame_roi = (x_start, y_start, roi_width, roi_height)
img.draw_rectangle(frame_roi,color=(255,246,143),thickness=1)
#**********************************************阈值处理**********************************************
gry.binary([THRESHOLD])
# gry.erode(1)
# gry.invert()
# gry.find_edges(image.EDGE_CANNY)
# gry.dilate(3)
# Display.show_image(img)
#**********************************************找矩形**********************************************
rec = None
print(frame_roi)
rec =gry.find_rects(threshold=15000)#zfx
# print(rec)
Fx_min = find_center_min_FX(rec,roi_width,roi_height,x_start,y_start)
# if len(Fx_min)>1: continue
if Fx_min:
bs = Fx_min.corners()
Jx1 = bs[0][0]
Jy1 = bs[0][1]
Jx2 = bs[1][0]
Jy2 = bs[1][1]
img.draw_line(bs[0][0],bs[0][1],bs[1][0],bs[1][1])
img.draw_line(bs[1][0],bs[1][1],bs[2][0],bs[2][1])
img.draw_line(bs[2][0],bs[2][1],bs[3][0],bs[3][1])
img.draw_line(bs[3][0],bs[3][1],bs[0][0],bs[0][1])
# Display.show_image(img)
BC = cmath.sqrt(((Jx1-Jx2)*(Jx1-Jx2))+((Jy1-Jy2)*(Jy1-Jy2)))
WT_JL = BC/largest_blob1.h()*FRAME_HEIGH_MM
print("矩形边长:",WT_JL)
# Display.show_image(gry)
#**********************************************找圆**********************************************
else:
# Display.show_image(img)
# continue
rec = None
rec =gry.find_circles(roi =frame_roi, threshold=6000)
# print(rec)
if len(rec)>1: continue
if rec:
for i in rec:
img.draw_circle(i.x(),i.y(),i.r())
BC = 2*i.r()
WT_JL = BC/largest_blob1.h()*FRAME_HEIGH_MM
print("圆形直径:",WT_JL)
#***********************************************找三角******************************************
else:
find_of_xz = grays.find_blobs([colorBloer],roi=frame_roi)
if(find_of_xz):
largest_blob = max(find_of_xz,key=lambda k:k.pixels())
img.draw_rectangle(largest_blob.rect(),color=(255,0,0),thickness=10)
Sjx_bc = cmath.sqrt(4*largest_blob.pixels()/cmath.sqrt(3))
# 计算内部边长
WT_JL = Sjx_bc/largest_blob1.h()*FRAME_HEIGH_MM
print("三角形边长:",WT_JL)
if BZ_JL!=None and WT_JL!=None:
Last_BZ_JL.append(BZ_JL)
if isinstance(WT_JL, complex):
Last_WT_JL.append(WT_JL.real)
else:
Last_WT_JL.append(WT_JL)
if len(Last_WT_JL)>6:
Last_BZ_JL_data = median_filter(Last_BZ_JL,5)
Last_WT_JL_data = median_filter(Last_WT_JL,5)
d1 = round(sum(Last_BZ_JL_data)/len(Last_BZ_JL_data)/10)
d2 = round(sum(Last_WT_JL_data)/len(Last_WT_JL_data)/10,3)
Usart_for_data_Se(f"t8.txt=\"{d1}\"")
Usart_for_data_Se(f"t9.txt=\"{d2}\"")
flag = 1
else:
Err = Err+1
if Err>10:
d1 = round((BZ_JL)/10,3)
random_number = random.uniform(6, 13)
Usart_for_data_Se("t20.txt=\"ERROR\"")
Usart_for_data_Se(f"t8.txt=\"{d1}\"")
Usart_for_data_Se(f"t9.txt=\"{random_number}\"")
return 1
Display.show_image(img)
gc.collect()
return 0
def T2():
Last_BZ_JL = []
Last_WT_JL = []
WT_JL = None
BZ_JL = None
flag = 0
Err = 0
while flag ==0:
img = sensor.snapshot()
# img = img.lens_corr(0.1)
img.draw_rectangle(box,color=(255,0,0))
grays = img.to_grayscale()
gry = grays
grays.lens_corr(0.5)
find_box = grays.find_blobs([THRESHOLD],roi=box)
if(find_box):
largest_blob1 = find_center(find_box)
if(largest_blob1):
img.draw_rectangle(largest_blob1.rect(),color=(0,0,255),thickness=10)
# 计算实际距离
b_x = largest_blob1.x()
b_y = largest_blob1.y()
b_w = largest_blob1.w()
b_h = largest_blob1.h()
BZ_JL = BD_JL*BD_H/b_h
print("距离1:",BZ_JL)
# BZ_JL = BD_JL*BD_W/b_w
# print("距离2:",BZ_JL)
# 内部找小图形
x_start = largest_blob1.x()+10
y_start = largest_blob1.y()+10
roi_width = largest_blob1.w()-20 # 最小宽度=1
roi_height = largest_blob1.h()-20 # 使用高度而非宽度!
frame_roi = (x_start, y_start, roi_width, roi_height)
img.draw_rectangle(frame_roi,color=(255,246,143),thickness=1)
#**********************************************阈值处理**********************************************
gry.binary([(45,255)])
# gry.invert()
# gry.find_edges(image.EDGE_CANNY)
# gry.dilate(3)
# Display.show_image(img)
#**********************************************找矩形**********************************************
rec = None
print(frame_roi)
rec =gry.find_rects(threshold=15000)#zfx
# print(rec)
Fx_min = find_center_min_FX(rec,roi_width,roi_height,x_start,y_start)
# if len(Fx_min)>1: continue
if Fx_min:
bs = Fx_min.corners()
Jx1 = bs[0][0]
Jy1 = bs[0][1]
Jx2 = bs[1][0]
Jy2 = bs[1][1]
img.draw_line(bs[0][0],bs[0][1],bs[1][0],bs[1][1])
img.draw_line(bs[1][0],bs[1][1],bs[2][0],bs[2][1])
img.draw_line(bs[2][0],bs[2][1],bs[3][0],bs[3][1])
img.draw_line(bs[3][0],bs[3][1],bs[0][0],bs[0][1])
# Display.show_image(img)
BC = cmath.sqrt(((Jx1-Jx2)*(Jx1-Jx2))+((Jy1-Jy2)*(Jy1-Jy2)))
Shiji = BC/(largest_blob1.w()/(BD_JL*BD_W/BZ_JL))
WT_JL = Shiji/largest_blob1.h()*FRAME_HEIGH_MM
print("矩形边长:",WT_JL)
if BZ_JL!=None and WT_JL!=None:
Last_BZ_JL.append(BZ_JL)
Last_WT_JL.append(WT_JL.real)
if len(Last_WT_JL)>6:
Last_BZ_JL_data = median_filter(Last_BZ_JL,3)
Last_WT_JL_data = median_filter(Last_WT_JL,3)
d1 = round(sum(Last_BZ_JL_data)/len(Last_BZ_JL_data)/10)
d2 = round(sum(Last_WT_JL_data)/len(Last_WT_JL_data)/10,3)
Usart_for_data_Se(f"t14.txt=\"{d1}\"")
Usart_for_data_Se(f"t15.txt=\"{d2}\"")
flag = 1
else:
Err = Err+1
if Err>10:
d1 = round((BZ_JL)/10,3)
random_number = random.uniform(6, 13)
Usart_for_data_Se("t20.txt=\"ERROR\"")
Usart_for_data_Se(f"t14.txt=\"{d1}\"")
Usart_for_data_Se(f"t15.txt=\"{random_number}\"")
return 1
Display.show_image(img)
gc.collect()
return 0
def T3():
Last_BZ_JL = []
Last_WT_JL = []
WT_JL = None
BZ_JL = None
flag = 0
Err = 0
while flag ==0:
img = sensor.snapshot()
# img = img.lens_corr(0.1)
img.draw_rectangle(box,color=(255,0,0))
grays = img.to_grayscale()
gry = grays
grays.lens_corr(0.5)
find_box = grays.find_blobs([THRESHOLD],roi=box)
if(find_box):
largest_blob1 = find_center(find_box)
if(largest_blob1):
img.draw_rectangle(largest_blob1.rect(),color=(0,0,255),thickness=10)
# 计算实际距离
b_x = largest_blob1.x()
b_y = largest_blob1.y()
b_w = largest_blob1.w()
b_h = largest_blob1.h()
BZ_JL = BD_JL*BD_H/b_h
print("距离1:",BZ_JL)
# BZ_JL = BD_JL*BD_W/b_w
# print("距离2:",BZ_JL)
# 内部找小图形
x_start = largest_blob1.x()+10
y_start = largest_blob1.y()+10
roi_width = largest_blob1.w()-20 # 最小宽度=1
roi_height = largest_blob1.h()-20 # 使用高度而非宽度!
frame_roi = (x_start, y_start, roi_width, roi_height)
img.draw_rectangle(frame_roi,color=(255,246,143),thickness=1)
#**********************************************阈值处理**********************************************
gry.binary([(45,255)])
# gry.invert()
# gry.find_edges(image.EDGE_CANNY)
# gry.dilate(3)
# Display.show_image(img)
#**********************************************找矩形**********************************************
if BZ_JL!=None:
Last_BZ_JL.append(BZ_JL)
if len(Last_BZ_JL)>6:
Last_BZ_JL_data = median_filter(Last_BZ_JL,3)
d1 = round(sum(Last_BZ_JL_data)/len(Last_BZ_JL_data)/10)
random_number = random.uniform(6, 13)
Usart_for_data_Se(f"t14.txt=\"{d1}\"")
Usart_for_data_Se(f"t16.txt=\"{random_number}\"")
flag = 1
else:
Err = Err+1
if Err>19:
Usart_for_data_Se("t20.txt=\"ERROR\"")
return 1
Display.show_image(img)
gc.collect()
return 0
def Res_Led():
Usart_for_data_Se(f"t8.txt=\"\"")
Usart_for_data_Se(f"t9.txt=\"\"")
Usart_for_data_Se(f"t14.txt=\"\"")
Usart_for_data_Se(f"t15.txt=\"\"")
Usart_for_data_Se(f"t16.txt=\"\"")
def main():
try:
# Usart_for_data_Se("page a1")
# Usart_for_data_Se("t8.txt=\"185.61\"")
while True:
Messge = Usart_PD_Data()
if Messge['Id']==2:
if Messge['Tm']==1:
Res_Led()
Usart_for_data_Se("t20.txt=\"Loading..\"")
ZZ = T1()
if ZZ==0:
Usart_for_data_Se("t20.txt=\"OK\"")
elif Messge['Tm']==2:
Res_Led()
Usart_for_data_Se("t20.txt=\"Loading..\"")
ZZ=T2()
if ZZ==0:
Usart_for_data_Se("t20.txt=\"OK\"")
elif Messge['Tm']==3:
Res_Led()
Usart_for_data_Se("t20.txt=\"Loading..\"")
ZZ=T3()
if ZZ==0:
Usart_for_data_Se("t20.txt=\"OK\"")
# ts()
uart.deinit()
except Exception as e:
print(f"发生错误: {e}")
uart.deinit()
#(92, 0, -66, 19, 124, -16)
if __name__ == "__main__":
main()
2025年电赛C题算法部分
计算实际距离
BZ_JL = BD_JL*BD_H/b_h
计算矩形边长像素
BC = cmath.sqrt(((Jx1-Jx2)*(Jx1-Jx2))+((Jy1-Jy2)*(Jy1-Jy2)))
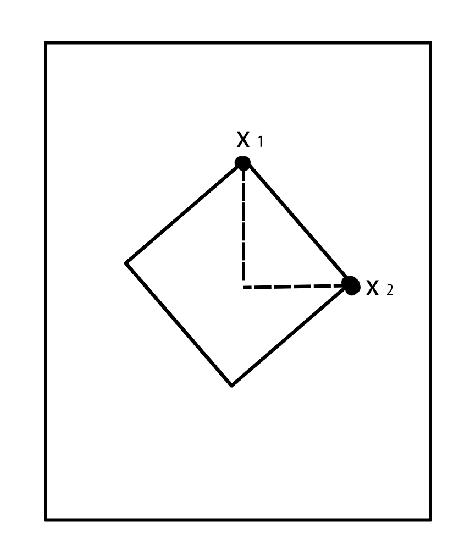
实际边长与像素边长的转换
WT_JL = BC/largest_blob1.h()*FRAME_HEIGH_MM
等边三角形面积-边长像素转换
Sjx_bc = cmath.sqrt(4*largest_blob.pixels()/cmath.sqrt(3))