本文最后更新于375 天前,其中的信息可能已经过时,如有错误请发送邮件到2067965693@qq.com
实现方法:
通过不同占空比的方波信号经过RC低通滤波实现正弦波效果
由generate_sine_pwm_values函数产生所需占空比数据
/**
* @brief 生成正弦波对应的PWM占空比序列
* @param arr 自动重装载值(决定PWM周期)
* @param amplitude 正弦波幅度系数(0.0~0.5,建议0.3)
* @param ccr_values 输出数组,存储计算后的CCR寄存器值
* @param n 采样点数(默认100)
* @note 占空比范围:0.5±amplitude(避免0%/100%失真)
*/
void generate_sine_pwm_values(uint16_t arr, float amplitude, uint16_t *ccr_values, uint16_t n) {
for (uint16_t i = 0; i < n; i++) {
// 计算正弦波角度(0~2π)
float angle = 2 * M_PI * i / n;
// 计算占空比:0.5 + 幅度*sin(角度)
float duty_cycle = 0.5f + amplitude * sinf(angle);
// 映射到CCR寄存器值(占空比 * ARR)
ccr_values[i] = (uint16_t)(duty_cycle * arr);
}
}完整代码:
#include "stm32f10x.h" // Device header
#include "math.h"
#include <stdint.h>
#define GA GPIOA
#define GP GPIO_Pin_0
#ifndef M_PI
#define M_PI 3.14159265358979323846
#endif
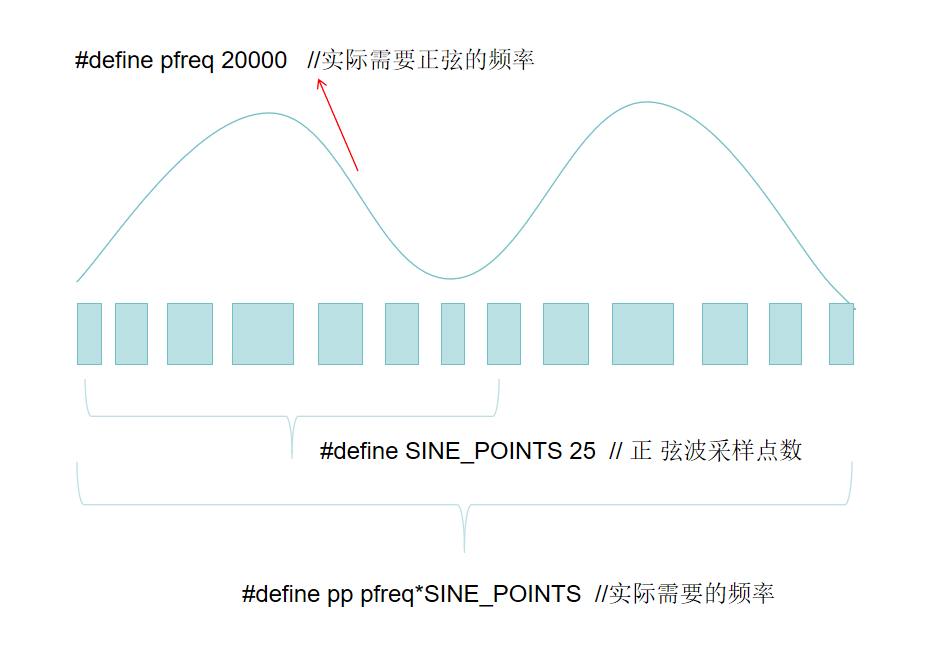
#define pfreq 20000 //实际需要正弦的频率
#define SINE_POINTS 25 // 正 弦波采样点数
#define pp pfreq*SINE_POINTS //实际需要的频率
#define psc 1 //预分频系数,低的话分辨率高
// 正弦波查找表
uint16_t sineTable[SINE_POINTS];
unsigned char status = 0;
uint32_t ARRPeriod = (72000000 / (pp*psc)) - 1; //需要频率的arr值
/**
* @brief 生成正弦波对应的PWM占空比序列
* @param arr 自动重装载值(决定PWM周期)
* @param amplitude 正弦波幅度系数(0.0~0.5,建议0.3)
* @param ccr_values 输出数组,存储计算后的CCR寄存器值
* @param n 采样点数(默认100)
* @note 占空比范围:0.5±amplitude(避免0%/100%失真)
*/
void generate_sine_pwm_values(uint16_t arr, float amplitude, uint16_t *ccr_values, uint16_t n) {
for (uint16_t i = 0; i < n; i++) {
// 计算正弦波角度(0~2π)
float angle = 2 * M_PI * i / n;
// 计算占空比:0.5 + 幅度*sin(角度)
float duty_cycle = 0.5f + amplitude * sinf(angle);
// 映射到CCR寄存器值(占空比 * ARR)
ccr_values[i] = (uint16_t)(duty_cycle * arr);
}
}
void PwmInit(void){
generate_sine_pwm_values(ARRPeriod,0.3,sineTable,SINE_POINTS);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period =ARRPeriod;
TIM_TimeBaseInitStruct.TIM_Prescaler = psc-1;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GA,&GPIO_InitStruct);
// GPIO
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = 0;
TIM_OC2Init(TIM2,&TIM_OCInitStruct);
TIM_Cmd(TIM2,ENABLE);
}
volatile uint16_t sineIndex = 0;
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
// 更新PWM占空比
uint8_t hol = 0;
TIM_SetCompare2(TIM2, sineTable[sineIndex]);
sineIndex++;
if (sineIndex >= SINE_POINTS)
{
sineIndex=0;
}
// 清除中断标志位
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}